微操作机器人系统
首先,我们先来认识一下那个会微操作的机器人长啥样?
这其实是南开大学研制的“面向生物医学工程的微操作机器人系统”,是以一台倒置显微镜为主体,配置了左右两个可握持工具进行空间三自由度运动的机械臂、平面两自由度可控平台以及自动调焦系统。系统可在显微视觉引导下,由计算机控制,双臂协调地机械自动或半自动的操作。
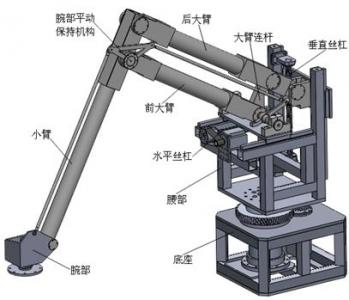
面向生物医学的微操作机器人系统样机示意图(来源网络)
那这样的设计让机器人具有什么特点?说白了,其实就是很准很精确。
它能够控制的误差范围比人类要小得多,所以操作的精确度也比人类高得多,所以通常用于微米精度的运动——它的功能覆盖了生物医学工程的主要操作(如染色体切割,细胞转基因注射等),可在异常微小的操作空间内运动,适合于在细胞级水平上进行切割、注射、微电位测量等典型的生物医学工程操作,对生物医学研究,特别是在植物学研究,遗传工程研究,建立动、植物(包括人类)的DNA文库等高科技领域中都有十分重要的应用。
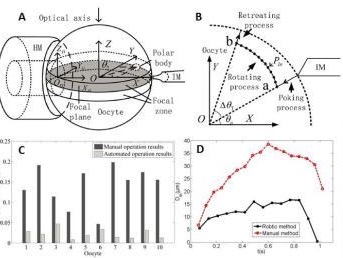
基于最小力的机器人化体细胞核移植理论数据(来源南开大学)

克隆猪仔(来源南开大学 钟欣 摄)
我们都知道机器人由于是通过计算来进行操作,必然会比人类更加精准,但是此次将机器人真正运用于微生物领域,实属人类在生物探索与改造上的巨大进步。
为啥?因为它的误差小啊!打个比方,如果说人类操作的难度相当于去除葡萄核,那么机器人操作的难度大概就是去除火龙果的籽了。
据专家分析,整个实验中,手动操作后的细胞最大变形30至40微米,经过计算后的机器人操作细胞最大变形降低至10微米到15微米。这样的操作使得在细胞核移植操作过程中能够受力最小、细胞变形最小,大大降低了对细胞的伤害,从而提高了体细胞克隆技术的精确度,这下明白机器人有多厉害了吧!
微生物克隆技术
我们回到新闻的另一个主题,也就是在机器人“操刀”下“诞生”的几只克隆小猪。
这是一种体细胞克隆技术,大家熟知的克隆羊多利就是通过这种技术诞生的。当初诞生一只克隆羊有多轰动就能知道这项技术有多困难,明明在植物领域插个枝就能解决的事情,到了动物界可谓愁煞几代人。
1938年,德国实验胚胎学家H·施佩曼(1869-1941)首先提出动物克隆的设想:即从发育到后期的胚胎中取出细胞核,将其移植到一个卵子中去,使其繁殖。1952年,美国费城癌症研究所的科学家首次进行动物克隆实验,未获成功。1986年英国科学家魏拉德森首次利用细胞核移植法克隆出一只羊,以后又有人相继克隆出牛、羊、鼠、兔、猴等。

克隆动物的发展史(来源网络)
责任编辑:刘微
- 机器人成了新“物种”人类能否控制人工智能?2017-11-03
- 哈佛大学研发的蜜蜂机器人会游泳了:仅175毫克2017-11-02
- 机器人将抢走人类工作?美调查显示多数人不相信2017-11-01
- 机器人制造者:未来20年内将有人类与机器人结婚2017-10-31
- 北欧银行将在未来4年内裁员6000人 削减成本用机器换人!2017-10-28
- 沙特女性机器人“索菲娅”获沙特国籍2017-10-28
- LOL机器人新皮肤典范枪骑曝光 机器人新皮肤典范枪骑预览2017-10-25
- 漂亮“小姐姐”为你服务 日本机器人酒店竟越开越多!2017-10-25
- LOL测试服机器人新皮肤曝光 Q技能钩子变身长枪2017-10-20
- 米家扫地机器人招募新品体验官 二代即将发布?2017-09-12









- 最新国际新闻 频道推荐
-

美国总统特朗普在日韩停留天数不同 韩国对美2017-11-12
- 进入图片频道最新图文




- 进入视频频道最新视频




- 一周热点新闻


已有0人发表了评论